
Alex Molina & Kadeem Nibbs
Computational Physics 375 – Final Project
Project Motivation
We wanted to model the Long Jump track & field event to see if we could mathematically incorporate technical elements to the simple projectile motion model and see tangible differences in jump distances. We also wanted to model the effects of air, since we thought that wind speed and air density must have some effect on jump distances, but did not know how to quantify its impact. We believed we could achieve these goals with a comprehensive Matlab program, and Chapter 2 of Giordano and Nakanishi’s Computational Physics on realistic projectile motion gave us a clear starting point.
Program Description
This program simulates the long jump track and field event to observe changes in jump distance as related variables are adjusted. The variables we were most interested in are: air density, to determine if jumps done at different altitudes are comparable; wind speed, to observe how much wind resistance can affect performance; whether or not the athlete cycles his or her arms in the air, to see how this movement affects body position in the air; and, of course, the final jump distance. We could also adjust the size of our athlete using our program, but the adjustments, as long as they are kept within reasonable limits, would have a negligible effect on the results. The athlete’s physical proportions are based off of our very own Kadeem Nibbs, who always wanted to participate in the long jump but never could due to scheduling conflicts.
We originally wanted to use 3D models to run all of our tests, but working with 3D shapes and deforming them proved difficult. We decided to use point particles for the tests where they provide an accurate approximation (wind assistance and air density), and then 2D “patch” shapes for tests where body position became exceedingly important (limb cycling). For the trial where the athlete did not cycle his limbs, we created one fixed-shape rectangle to model the athlete’s body, as if he were held rigid throughout the entire jump. We modeled the athlete with two rectangles when limb cycling was allowed, one rectangle to represent the torso, and another for the legs, so that they could move independently.
Final Results
Real World properties and their affect on Long Jumping:
While our preliminary results showed that wind had a major impact on the final jump distance, with a difference of 7m/s resulting in a change of approximately 2 meters in jump distance, we found that this was due to a missing square root sign when calculating velocity. When this was fixed, we found that the same difference in wind speed accounted for a difference in inches in jump distance.
Our Resulting Projectile Motion with Varying Wind Speed:
Our Resulting Projectile Motion with Varying Wind Speed (close up view):
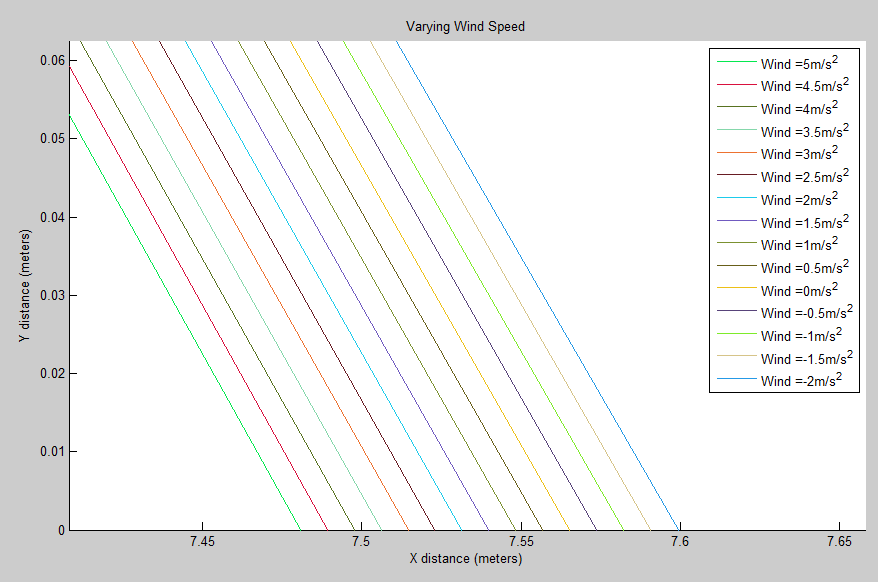
A 0.1 change in meters is about a difference of 4 inches. While this may seem negligible on a macroscopic level, the top two World Records in the long jump only differ by 4.5 inches. So a fortuitous wind gust may be the difference between a gold medal and nothing.
For our second real world property we found that air density had a negligible effect on the jump distance, as variations of up to 50% in air density resulted in less than a millimeter of difference. This reaffirms what was learned in introductory mechanics: that air resistance is negligible in most cases of projectile motion, with exceptions being when the air is moving and when the object is moving at high speeds.
Our Resulting Projectile Motion with Varying Air Density:

Air resistance will not significantly affect an athlete jumping at 20mph into still air. This also shows that although air density can be as high as 1.2kg/m^-3 at cities near sea level, and as low at .75kg/m^-3 at cities 5000m above sea level, long jumps performed at any city in the world can be compared because of air density’s negligible effects on performance.
Modeling the Human with the Patch Mechanism:
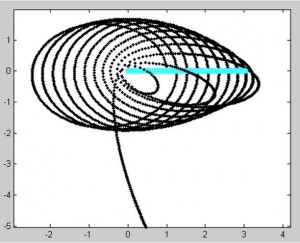
After thoroughly researching track and field coaching manuals and websites, we learned that the purpose of cycling one’s arms and legs while in the air is to keep one’s torso from rotating forward. The torque generated during an athlete’s takeoff typically generates a large forward angular momentum. As a result, if an athlete does not cycle their arms/legs properly while midair, they may end up tilting too far forward, hitting the ground face first, and losing some of their teeth. This is demonstrated in the figure below when our code is run.
Our Resulting Projectile Motion Modeling a Human without limb cycling (head diving):
The forward angular momentum is especially detrimental because, if the torso is angled too far forward during the jump, the legs will inevitably end up far behind the body. Since jump distance is recorded at the furthest back mark in the sand, if the athlete’s feet strike the ground a meter behind his center of mass, he is effectively disqualifying himself from competition.
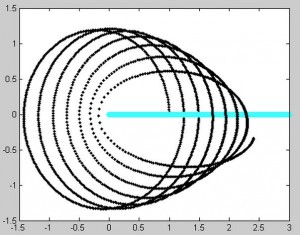
By cycling his arms and legs, the athlete creates a forward angular momentum that is hopefully as large as that of his torso. Since angular momentum is conserved for a projectile not subjected to any external torques, this generated angular momentum is subtracted from the torso’s angular momentum, allowing the athlete to stay upright.
Our Resulting Projectile Motion Modeling a Human while limb cycling:
In this upright position, it is easy to tuck the legs in front of the body, so that the hips are the first to strike the ground. With this change in technique, we noted a difference of approximately 1.5 meters in the final jump distance.
Future Goals and Endeavors:
Continuing with this work, we would like to get a more holistic model of the long jump, as the run preceding the takeoff, which we entirely ignored, is an essential part of the event. We would like to see how the approach speed to the jump affects the optimal takeoff angle, and also incorporate arms and more realistic body proportions for our athlete. We believe that this project has a future where a variation of our code could be used by coaches and athletes to see what a human body’s characteristics must be in order to have the most efficient and longest jump. This could mean studying how a different weight, speed, height, cross sectional area, etc. could produce the “perfect conditions for jumping the longest.”
Overall, we were able to model a human figure using the patch mechanism and we were very satisfied with this result. We were able to work together on close to 400 lines of difficult computational code and our knowledge of physical and computational concepts has since grown. We see now how realistic models can be designed on MatLAB and through this, they could be studied to see how different human characteristics could affect a long jumpers distance, whether it be a few millimeters to a few inches.
Our Final Computational Codes:
Our final MatLAB code with and without the added patch motions are uploaded on this drive (just click the image below). Note that all the codes are listed in a text file (such as Notepad for Windows). They will have to be manually copied into a script function in the Matlab program. This is due to the fact that we used a Citrix XenApp that allowed us to run MatLAB on our computers but not be able to save the files onto our own desktop.
References:
Knight, Randall Dewey. “Rotation of a Rigid Body.” Physics for Scientists and Engineers: A Strategic Approach. 3rd ed. Boston, Mass.: Addison-Wesley, 2012. 312-387. Print.
Giordano, Nicholas J., and Hisao Nakanishi. “Chapter 2: Realistic Projectile Motion.” Computational Physics. 2nd ed. Upper Saddle River, NJ: Pearson/Prentice Hall, 2006. Print.
MATLAB R2014b by MathWorks®
Acknowledgements:
We would like to thank Vassar College for allowing us to use their 24/7 Physics department computer room to help complete our project. We would also like to thank our peers for giving us feedback on how we could expand on our project and helping us with fixing some minor computer codes. And a final thank you to Professor Magnes for teaching us the essential basics to coding and for guiding our project to what it is today. It has been a wonderful semester and we know that we will use our computational knowledge to further our intellect as physicists.

















 . For an alpha of 0.0015:
. For an alpha of 0.0015:

 ; which is close to the true value,
; which is close to the true value,  . This yielded a precession rate of
. This yielded a precession rate of  , as compared to Mercury’s true value,
, as compared to Mercury’s true value,  . This corresponds to a percent error deviation of about 10.39.
. This corresponds to a percent error deviation of about 10.39.  , where e is the eccentricity and a is the semi-major axis length in astronomical units. Using the same method as given above, I was able to calculate the precession constants C for 7 different Mercurian systems, each with a different value of eccentricity. The results are shown below:
, where e is the eccentricity and a is the semi-major axis length in astronomical units. Using the same method as given above, I was able to calculate the precession constants C for 7 different Mercurian systems, each with a different value of eccentricity. The results are shown below:

 .
.