
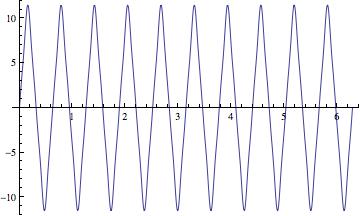
Origin Graph Depicting Scattering Intensity vs. Concentration
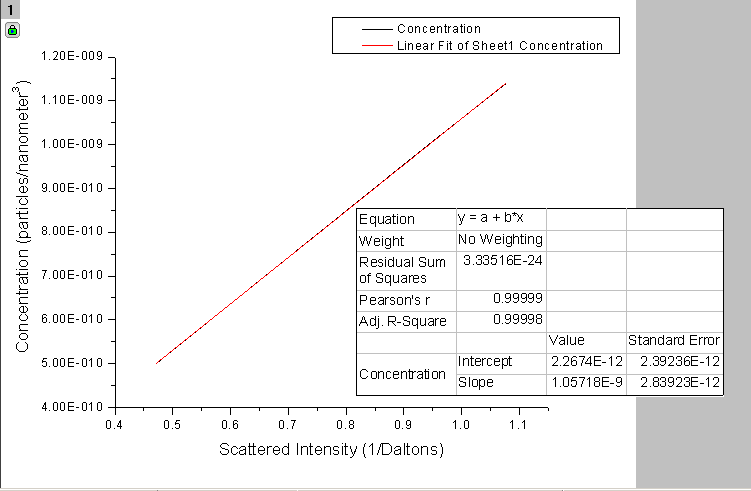
Using the theory of Static Light Scattering a graph was made for particle size 105 nm (in diameter) for volumes 1000, 2000, 3000, 4000 microliters and the predicted scattering intensity was found using Equation [3]. The wavelength used was 632.8 nanometers (red in the visible spectrum) so the particle size was within the Rayleigh limit. The scattering intensity was then plotted as the concentration of the particles was varied.
1/y-intercept was supposed to yield the molecular mass of a particle in Daltons. (1 Dalton=1amu). A linear fit was applied to the graph in order to find the y-intercept. As shown on the graph the y-intercept was found to be $2.3*{10^{-12}}$
which yields a molecular mass of approximately $4.5*{10^{11}} $ Daltons
In order to calculate the actual molecular mass of the microspheres the 2SPI website was used. Here’s the link: http://www.2spi.com/catalog/standards/microspheres.shtml
The approximate concentration listed on the website of the 0.105 micrometer spheres was ${10^{3}}$ particles/mL
The bead density was approximately $1.05$ grams/mL
which meant that each particle was approximately $1.05*{10^{-16}}$ kg
In order to convert between kilograms and Daltons it is important to note that $1.022*{10^{-27}}$ equals approximately 1 Dalton.
This yielded a molecular mass of $1.1*{10^{11}}$ Daltons
While the calculated molecular mass and the actual molecular mass are on the same scale (both ${10^{11}}$) the answer is still off by a factor of about 3 to 4.
This error may stem from the many approximations used when calculating the actual molecular mass. The number of particles/mL was estimated on the SPI website. Also the bead density was approximate. Since these polystyrene microspheres are mass produced it cannot be guaranteed that every particle is the exact same size and a perfect spherical shape. There will also be slight variations in the particle densities across different containers. However the particles need to meet certain standards, so the error is limited, but could possibly account for the small differences between the actual and calculated molecular mass.
In addition, since the slope was found to be $1.057*{10^{-9}}$ (which is greater than zero) it would appear, based on Static Light Scattering Theory, that the particles will stay in a stable solution. This information was confirmed on the 2SPI MSDS data and safety sheet for these microspheres (the sheet claims the solution formed with these sphere is stable).
Just for reference it seems like the method I used for calculating the molecular mass based on Static Light Scattering Theory is not the easiest, quickest, nor most accurate method. Equipment can be purchased that measures the intensity of the samples at different concentrations, compares it to a known standard, and outputs a Debye Plot which calculates the molecular mass and the gradient of the graph. However, it can be important to test theories in a more controlled method where every step of the process is known in order to check the accuracy of the theory and learn exactly how the equipment works.







 is the magnetic flux density (magnetic field strength) at a given distance above the bottom magnet,
is the magnetic flux density (magnetic field strength) at a given distance above the bottom magnet,  is the common area between the two plates, and
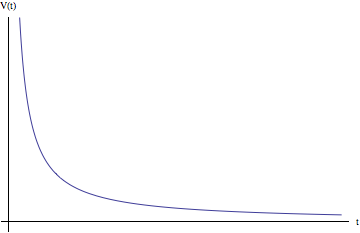
is the common area between the two plates, and  is the permeability of free space. In order to easily visualize this effect, I generalized the magnetic flux density by replacing it with a constant multiple times the inverse of distance cubed (which is the relationship between magnetic field strength and distance), producing the following graph in Mathematica:
is the permeability of free space. In order to easily visualize this effect, I generalized the magnetic flux density by replacing it with a constant multiple times the inverse of distance cubed (which is the relationship between magnetic field strength and distance), producing the following graph in Mathematica:

![\begin{equation*} M_\delta = \dfrac{1}{\sqrt{2}}\left[ \begin {array}{ccc} e^{j\delta}&0\\ \noalign{\medskip} 0&e^{-j\delta} \end {array} \right] \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-e6eb01795d8c2f32c200ebdcdc2fb573_l3.png "Rendered by QuickLaTeX.com")


![\begin{equation*} V = \frac{qc}{\sqrt{\left(c^2t-\frac{vz\sqrt{x^2+y^2+z^2}}{x^2+y^2+z^2}\right)^2 +\left(c^2-v^2\right)\left(x^2+y^2+z^2-c^2t^2\right)\right]}} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-bb03d4a473db4f0166ae6687bb56e5f7_l3.png "Rendered by QuickLaTeX.com")




 are floor functions.
are floor functions. we can say that
we can say that  .
.



 is the diameter of the wire and N is the number of turns.
is the diameter of the wire and N is the number of turns. with respect to t. Luckily, we did most of the work already when we derived B(t). The new equation reads:
with respect to t. Luckily, we did most of the work already when we derived B(t). The new equation reads:



 and the negative slope is
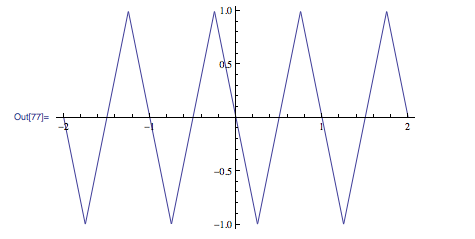
and the negative slope is  . From here I can ascertain the derivative simply by finding a function that flips back and forth between those two values every
. From here I can ascertain the derivative simply by finding a function that flips back and forth between those two values every  , which should look like a square function.
, which should look like a square function.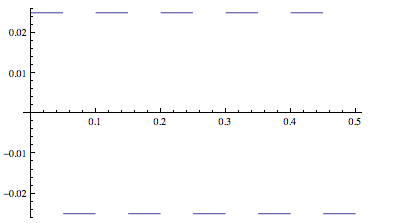
![\begin{equation*} .025\cdot sgn [sin(\frac{\pi t}{.05v)}] \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-a34736d1a434fddb943f1e8366405af3_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} \varepsilon = C \cdot .025\cdot sgn [sin(\frac{\pi t}{.05v})] \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-7101b86e94b893582fe0adf1d58e1fd4_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} I(t)=\frac{\varepsilon}{R}=.025C \frac {sgn [sin(\frac{\pi t}{.05v})]}{R} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-e7afaae06b1be564d63c2ae40327f8be_l3.png "Rendered by QuickLaTeX.com")
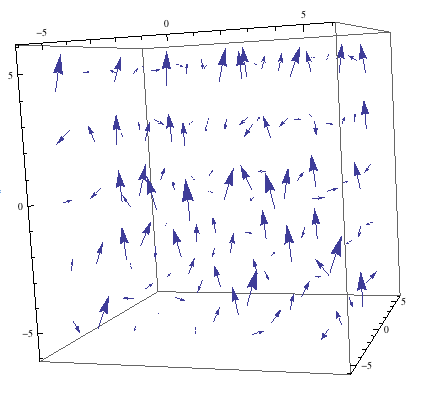
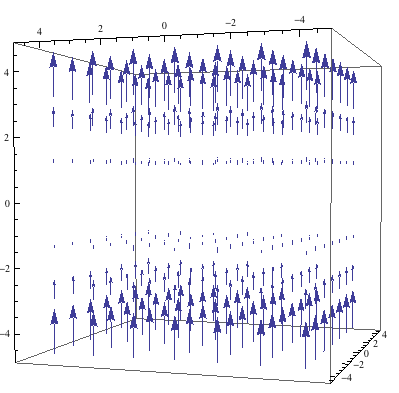
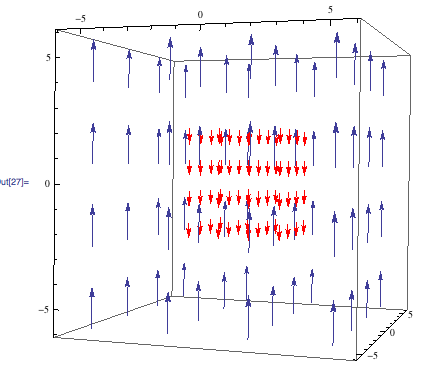
 are available to add to the magnetic field created by shimming. Each set of coils creates a magnetic field gradient in its direction. Below is a model of a correction field that uses the function
are available to add to the magnetic field created by shimming. Each set of coils creates a magnetic field gradient in its direction. Below is a model of a correction field that uses the function  :
:
 and
and 


 H-NMR Spectrum of 3,3-dimethyl-2-butanol
H-NMR Spectrum of 3,3-dimethyl-2-butanol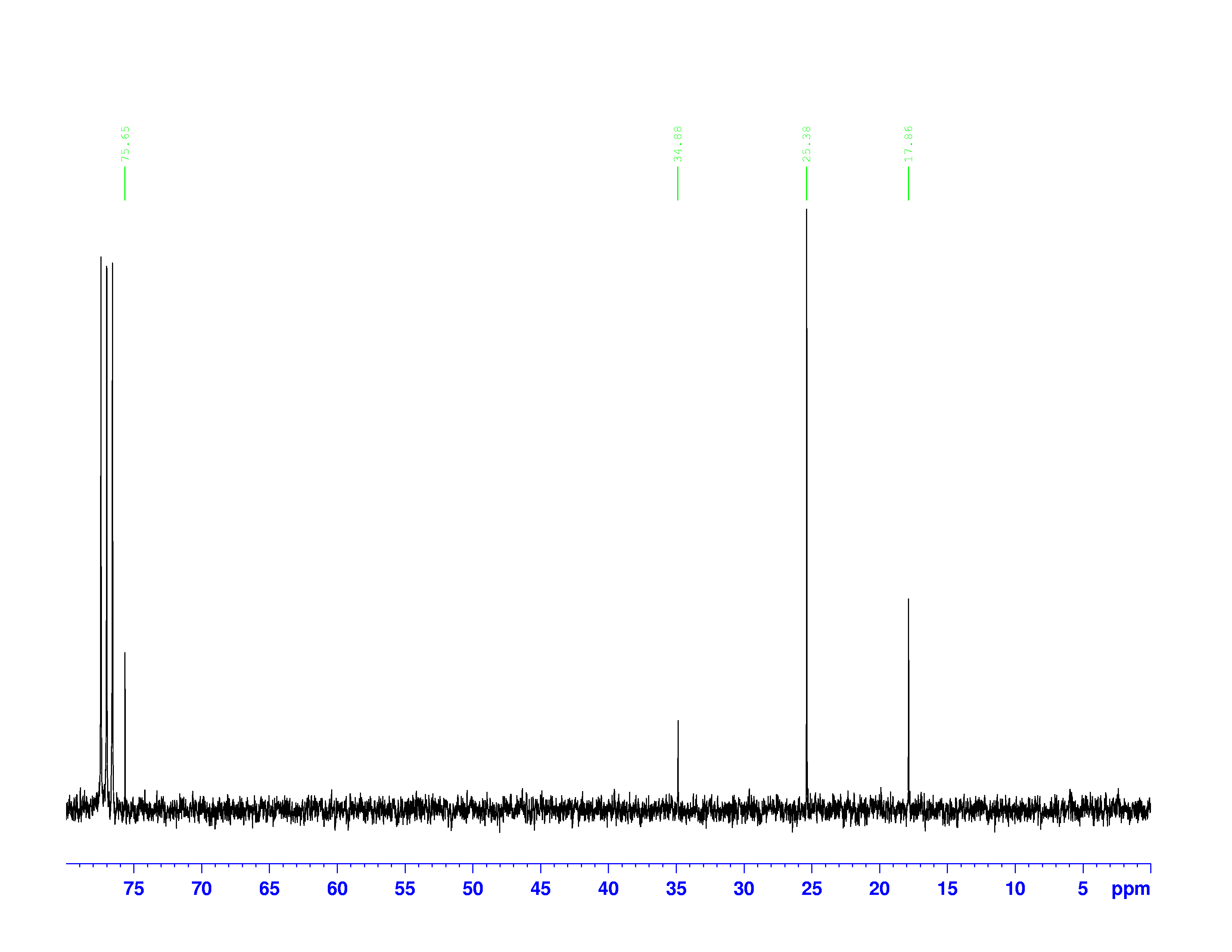
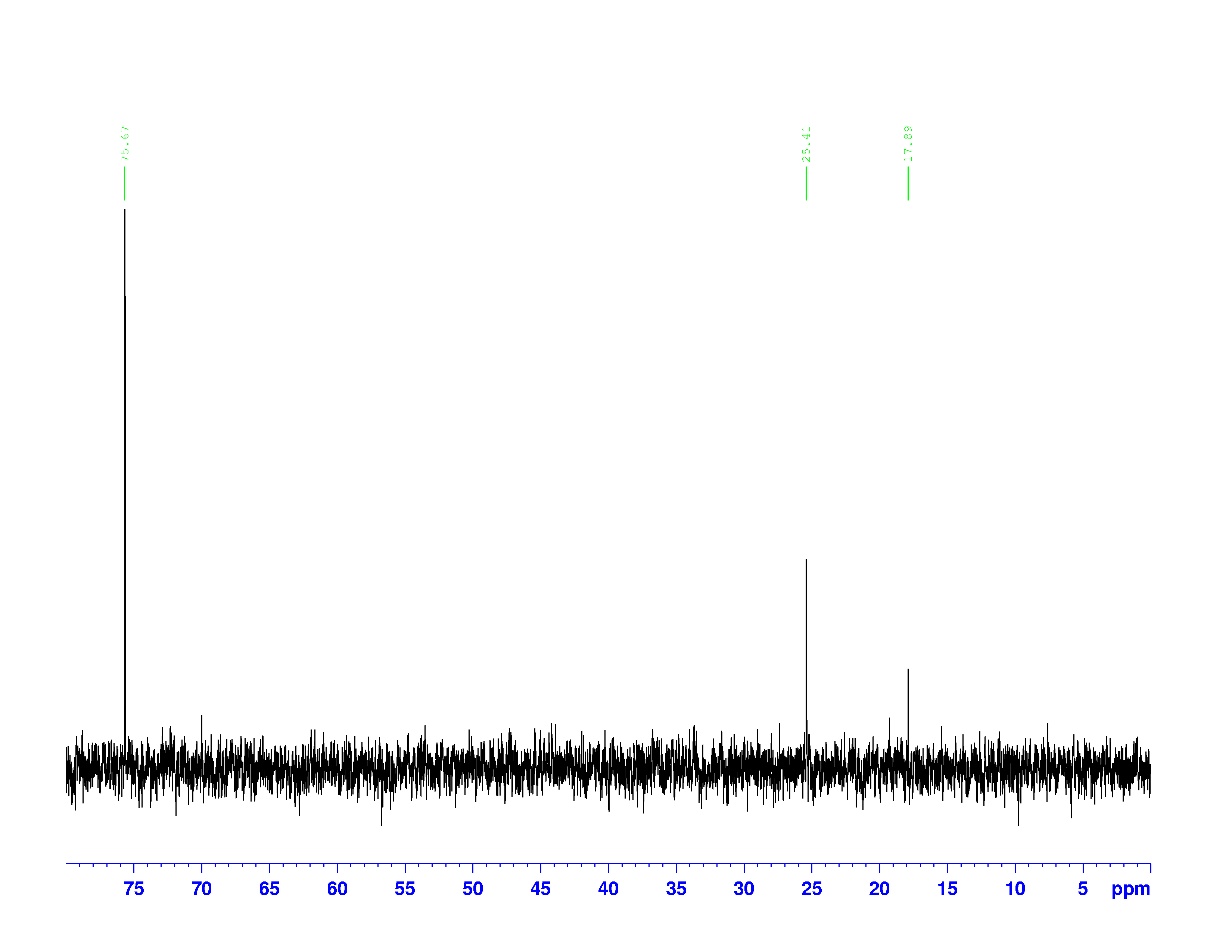
 C-NMR spectrum of 3,3-dimethyl-2-butanol
C-NMR spectrum of 3,3-dimethyl-2-butanol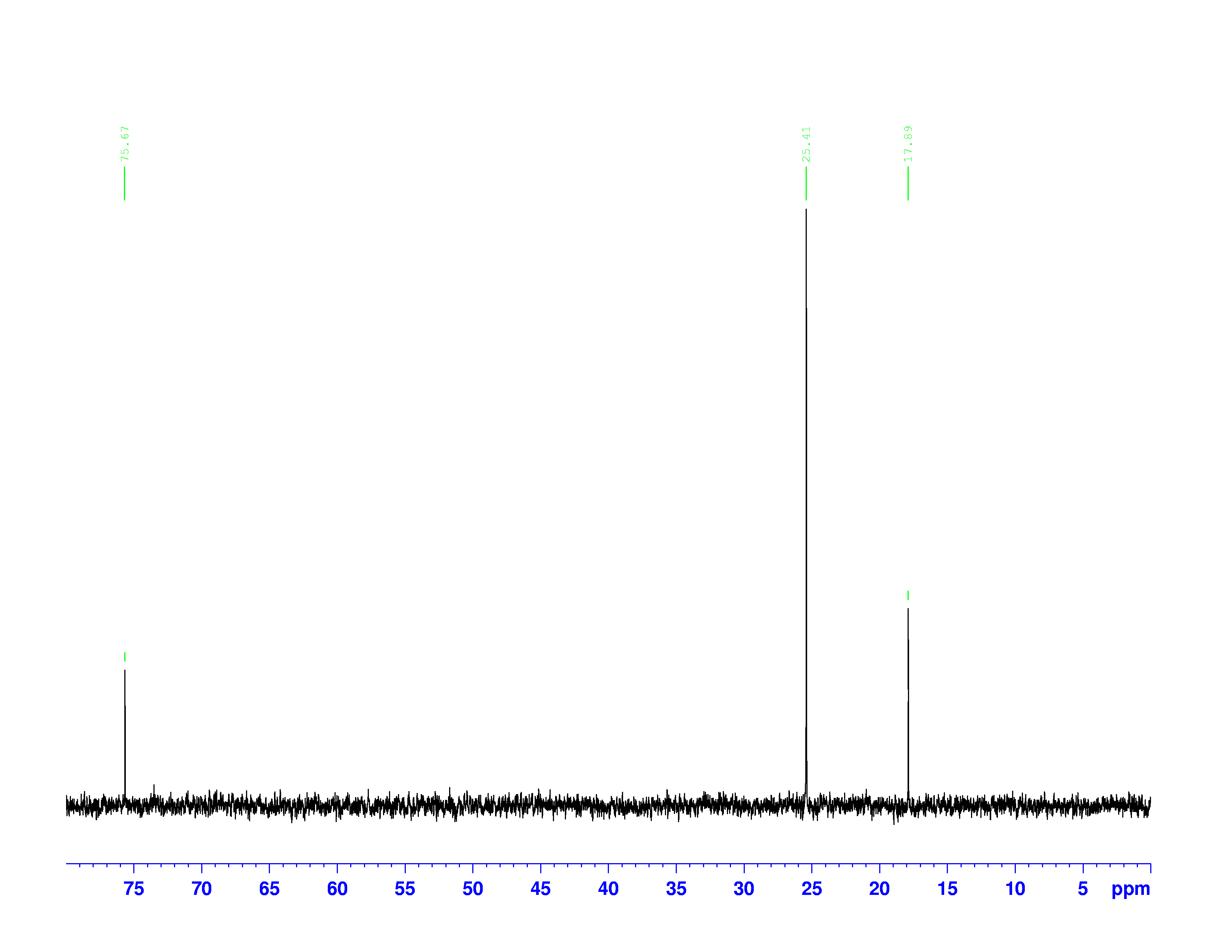

 . I will go a little more in depth on different angles effects later on
. I will go a little more in depth on different angles effects later on
 and lets orient the EoM to
and lets orient the EoM to  making the half wave plate Jones matrix
making the half wave plate Jones matrix  so the effect looks like this
so the effect looks like this
 is now in the y direction making the laser beam vertically polarized
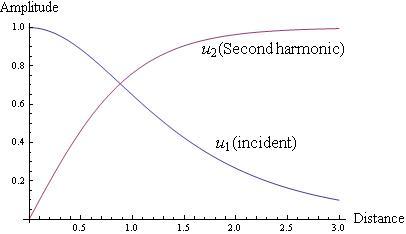
is now in the y direction making the laser beam vertically polarized . Below is a graph of the amount of
. Below is a graph of the amount of  , the red line that will exit the half wave plate as a function of
, the red line that will exit the half wave plate as a function of 
 you have only
you have only  you have equal amounts
you have equal amounts 
{kind=link}