
As of 4/13, I have yet to finish hacking and reassembling all of the equipment in my laboratory to take my own EMG (electromyography) data. As a refresher, an EMG is a means of measuring nerve activity by analyzing voltage changes in muscles either on the surface of the skin or subcutaneously. However, I believe that I should be able to complete the relevant assembly of the EMG kit prior to the end of the project.
That being said, I have completed the initial version of my data analysis code to be implemented in this project, as well as in my thesis. This version uses two data set inputs, a raw EMG signal, and a corresponding time vector. In addition, the code requires the sampling frequency. Beyond this, the experimenter has to set noise and contraction thresholds. The noise threshold serves the dual purpose of compensating for any noise not already dealt with in the Fourier transform, as well as setting the region below which the robot will relax and return to the rest state. The contraction threshold, determined by the relative magnitude of successive peaks to a standard strained peak determined immediately following the transform process.
The two Fourier transforms performed on the raw data, forward and back, allow the code to eliminate the most significant predictable sources of noise, that if left ignored, would render any analysis worthless. The three largest sources accounted for currently are movement artifacts, electrical artifacts, and electric noise. The first two noise signals are generated as a byproduct of the EMG process, mostly existing below 20 Hz. Most electric devices emit strong interference at 60 Hz. Following the forward transform, these frequencies are negated and zeroed, then back transformed to create a rectified, useable signal for later analysis.
The code is meant to reliably extract the peak amplitudes and cycle durations of up to two contractions by binning the raw EMG data into smaller datasets that are then analyzed. The reasons for this are that it makes coding less difficult as well as opening up the possibility of a quasi-continuous computation. By chopping the data into bins and analyzing them separately, the code can process data quickly after the signals are created, which in a living subject, corresponds to continuous motion of the prosthesis. In the picture below, the initial analysis code is represented as a flowchart.
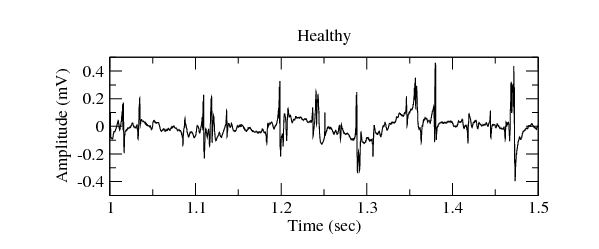
Additionally, I have found a raw sample EMG data set with a time vector, which if needed, can serve as the data for this project. This was available on a public domain, the link to which is below the figure of a raw EMG signal below and in the corresponding google drive document attached to this submission.
http://physionet.org/physiobank/database/emgdb/
Further work will include improving my code such that it is more independent of the data inputted, more modular, and generally faster/more efficient. Additionally, I have yet to comment on the code, which will be another component of this project. I expect for the final data to have improved my code and run analysis on either data that I have taken, or if I cannot get my experiment assembled and working to a reasonable extent, the sample EMG that was available online.
Relevant files can be found here:
https://drive.google.com/drive/u/0/#folders/0B0K4JjJfDy1ffkR4eEZaMzlxb0xvTjRjWDBIUm9iVzZuRmVyeG1aM0RhWHMxcVB6RXZDUFk

nice flowchart .
I couldn’t get your code to run. Please have your flowchart legible.