The induction process of the EDS system is depicted in the diagram below:

Figure 1. The principle of electrodynamic suspension. (a) As the upper current-carrying wire loop approaches the lower stationary conducting loop, the magnetic flux through the lower loop increases with time. The induced EMF in the lower loop, and the lagging induced current, are graphed with respect to time below. (b) As the smaller upper loop passes by the larger lower loop, there is no change in magnetic flux through the lower loop, so no additional EMF is induced. Instead, the built-up current in the loop begins to decline, due to the resistance of the wire. (c) As the upper loop moves away from the lower loop, an opposite EMF is induced, with the same magnitude as before, but negative. As a result, due to the loss in current during (b), there is a net negative current (the shaded region) flowing in the lower loop after the upper loop passes. (Reproduced from Jayawant.)
As seen in the figure, there remains an induced current in the lower loop (the conducting track) after the upper loop (on board the train) passes by, flowing in the opposite direction as the current that was initially induced. Thus, this process produces two forces: a lifting force (caused by the opposing magnetic fields generated by the upper and lower loops) and a drag force (caused by the residual current in the lower loop after the upper loop passes, which presents an attractive force on the upper loop in the direction opposite its motion).
From now on, I will focus on finding the relationships between the speed of the train (or, rather, the superconducting coils inside of it), the distance between the train and the tracks, and the magnetic lifting force and drag force that allow the EDS system to function.

 , from which we can derive the amount of force that the bottom of the train feels towards the track in a given area. However, the main component of this system that changes over time is the current flowing through the electromagnet, which would be extremely difficult to study analytically, and so I will focus on the other main maglev method.
, from which we can derive the amount of force that the bottom of the train feels towards the track in a given area. However, the main component of this system that changes over time is the current flowing through the electromagnet, which would be extremely difficult to study analytically, and so I will focus on the other main maglev method. and Lenz’s Law. As the train’s superconducting magnets (or current-carrying wires) move along the track, the magnetic field produced by these will move relative to the conducting track, thus generating eddy currents within the track itself. However, these eddy currents flow in a direction such that a magnetic field is produced that opposes the change in magnetic field entering the conducting track. Thus, the magnetic field produced by the train’s electromagnets or coils and the field produced by the track oppose one another, and create the repulsive force that causes the train to levitate.
and Lenz’s Law. As the train’s superconducting magnets (or current-carrying wires) move along the track, the magnetic field produced by these will move relative to the conducting track, thus generating eddy currents within the track itself. However, these eddy currents flow in a direction such that a magnetic field is produced that opposes the change in magnetic field entering the conducting track. Thus, the magnetic field produced by the train’s electromagnets or coils and the field produced by the track oppose one another, and create the repulsive force that causes the train to levitate.




![\begin{equation*} J = \exp[-i(\phi_0 +\beta_T)]R(-\psi_D)R(-\alpha_T)MR(\psi_D) \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-efe8d2ee48afbd95cad19e66551ef3b1_l3.png "Rendered by QuickLaTeX.com")


![\begin{equation} \[ R(\xi) = \begin{bmatrix} \cos{\xi} & \sin{\xi} \\-\sin{\xi} & \cos{\xi} \end{bmatrix} \] \end{equation}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-ade979f471ad784b7c7b0aae873383ad_l3.png "Rendered by QuickLaTeX.com")






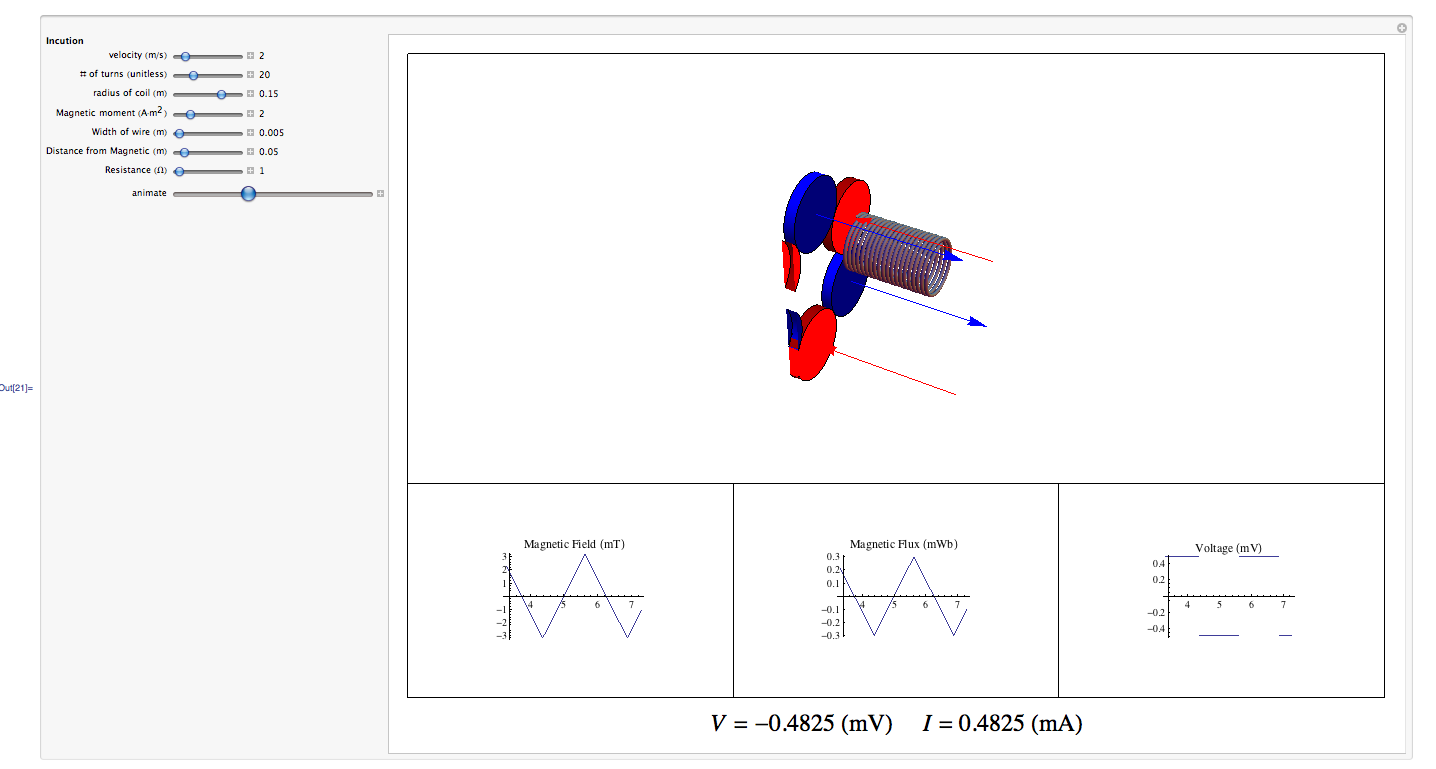
![\begin{equation*} \frac{4}{d/v}\left [ (t-2d/v)\cdot \left \lfloor \frac{2td}{v}+.5 \right \rfloor \right ]\cdot (-1)^{\left \lfloor \frac{2td}{v}+.5 \right \rfloor} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-3f591c8956631fb5d60f2cacaa4bdcc8_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} B=\frac{2\mu }{d^{3}}10^{-4}\frac{4}{d/v}\left [ (t-2d/v)\cdot \left \lfloor \frac{2td}{v}+.5 \right \rfloor \right ]\cdot (-1)^{\left \lfloor \frac{2td}{v}+.5 \right \rfloor} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-8a60c7a149de957131a98715e2cf96d9_l3.png "Rendered by QuickLaTeX.com")