
So, after having done extensive research into the various types of maglev technologies, I have found that the methods of electromagnetic suspension (EMS) and electrodynamic suspension (EDS) are the most developed and practiced types of magnetic levitation.
As explained before, EMS involves the electromagnets on board the train being attracted to the metallic track from underneath. The current running through the electromagnets is constantly adjusted to maintain a steady distance between the train and the track. One of the easiest ways to model the behavior of these types of maglev systems is by using the equation for magnetic pressure, given as  , from which we can derive the amount of force that the bottom of the train feels towards the track in a given area. However, the main component of this system that changes over time is the current flowing through the electromagnet, which would be extremely difficult to study analytically, and so I will focus on the other main maglev method.
, from which we can derive the amount of force that the bottom of the train feels towards the track in a given area. However, the main component of this system that changes over time is the current flowing through the electromagnet, which would be extremely difficult to study analytically, and so I will focus on the other main maglev method.
In the EDS system, the electromagnets on board the train induce in a conducting guide way (the track) eddy currents that generate an opposing magnetic field, creating a repulsive force that levitates the train as it moves along the track. This phenomenon is explained by a combination of Faraday’s Law  and Lenz’s Law. As the train’s superconducting magnets (or current-carrying wires) move along the track, the magnetic field produced by these will move relative to the conducting track, thus generating eddy currents within the track itself. However, these eddy currents flow in a direction such that a magnetic field is produced that opposes the change in magnetic field entering the conducting track. Thus, the magnetic field produced by the train’s electromagnets or coils and the field produced by the track oppose one another, and create the repulsive force that causes the train to levitate.
and Lenz’s Law. As the train’s superconducting magnets (or current-carrying wires) move along the track, the magnetic field produced by these will move relative to the conducting track, thus generating eddy currents within the track itself. However, these eddy currents flow in a direction such that a magnetic field is produced that opposes the change in magnetic field entering the conducting track. Thus, the magnetic field produced by the train’s electromagnets or coils and the field produced by the track oppose one another, and create the repulsive force that causes the train to levitate.
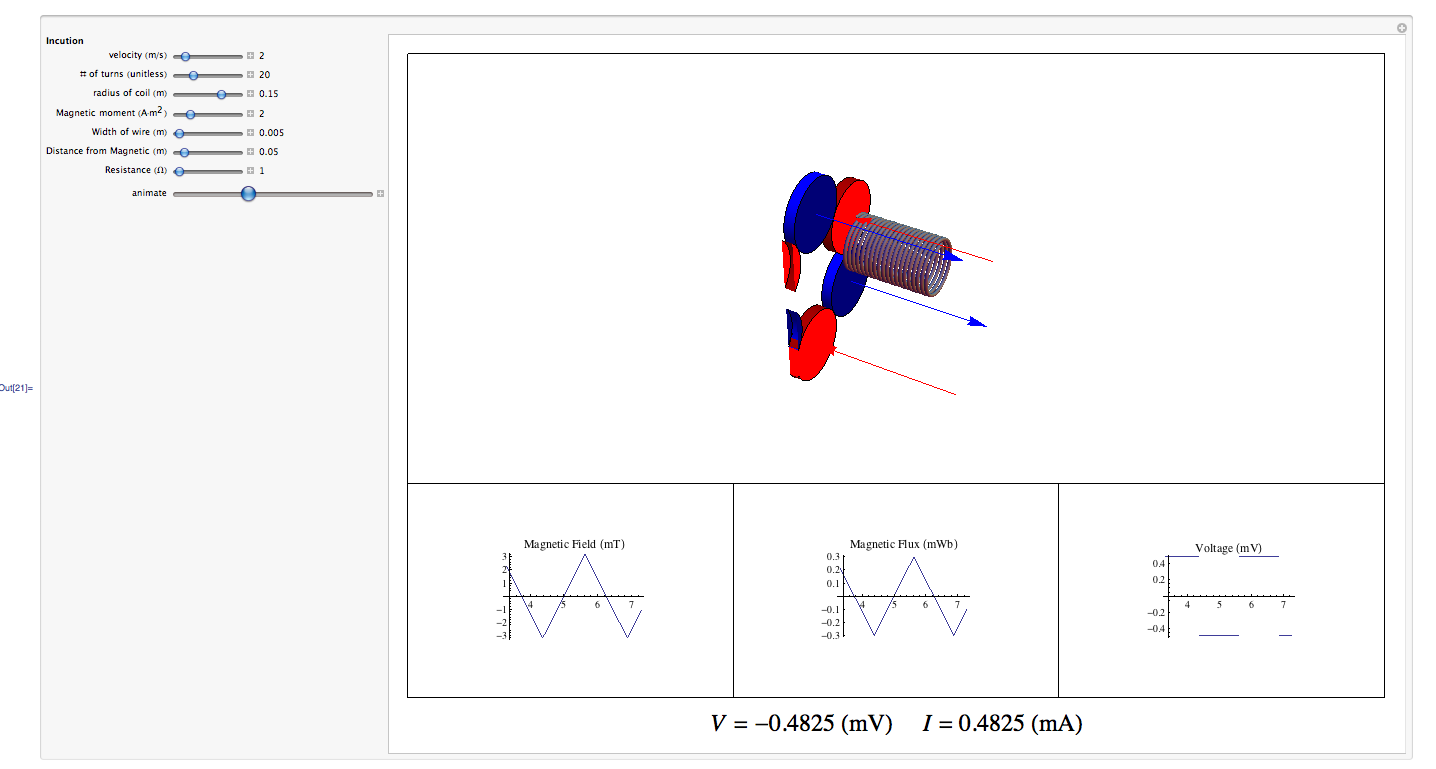
A simplified model of the interaction between the two opposing magnetic fields is given in the following vector plot. Notice how the two fields interact, opposing one another, resulting in a repulsive force between the two coils that are generating the fields. As the top coil is pulled downwards by gravity, the two fields will interact much more, increasing the repulsion force, and thus levitating the train containing the superconducting coils.





![\begin{equation*} J = \exp[-i(\phi_0 +\beta_T)]R(-\psi_D)R(-\alpha_T)MR(\psi_D) \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-efe8d2ee48afbd95cad19e66551ef3b1_l3.png "Rendered by QuickLaTeX.com")


![\begin{equation} \[ R(\xi) = \begin{bmatrix} \cos{\xi} & \sin{\xi} \\-\sin{\xi} & \cos{\xi} \end{bmatrix} \] \end{equation}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-ade979f471ad784b7c7b0aae873383ad_l3.png "Rendered by QuickLaTeX.com")






![\begin{equation*} \frac{4}{d/v}\left [ (t-2d/v)\cdot \left \lfloor \frac{2td}{v}+.5 \right \rfloor \right ]\cdot (-1)^{\left \lfloor \frac{2td}{v}+.5 \right \rfloor} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-3f591c8956631fb5d60f2cacaa4bdcc8_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} B=\frac{2\mu }{d^{3}}10^{-4}\frac{4}{d/v}\left [ (t-2d/v)\cdot \left \lfloor \frac{2td}{v}+.5 \right \rfloor \right ]\cdot (-1)^{\left \lfloor \frac{2td}{v}+.5 \right \rfloor} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-8a60c7a149de957131a98715e2cf96d9_l3.png "Rendered by QuickLaTeX.com")







![\begin{equation*} \frac{\partial^2}{\partial z^{2}}\widetilde{E}_{2}= \frac{\partial}{\partial z} [ \frac{\partial A_{2}}{\partial z}e^{i(k_{2}z-wt)} +ik_{2}A_{2}e^{i(k_{2}z-wt)}] \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-7346f50874aa7a9ddf5dfa433a9dd721_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} \frac{\partial^2}{\partial z^{2}}\widetilde{E}_{2}= [ \frac{\partial^{2} A_{2}}{\partial z^{2}} +ik_{2}\frac{\partial A_{2}}{\partial z}+ ik_{2} \frac{\partial A_{2}}{\partial z} -k^{2}_{2}A_{2}]e^{i(k_{2}z-wt)} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-7b620256237c766c7ee7484b9782369e_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} -[ \frac{\partial^{2} A_{2}}{\partial z^{2}} + 2ik_{2} \frac{\partial A_{2}}{\partial z}-k^{2}_{2}A_{2}]e^{i(k_{2}z-wt)} -\frac{\omega^{2}_{2}}{c^{2}}\epsilon^{(1)}(\omega_{2})A_{2}e^{i(k_{2}z-wt)} =\frac{4\pi \omega^{2}_{n}}{c^2}\bullet2dA^{2}_{1}e^{i(2k_{1}z-\omega_{2}t)} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-24c96f68b7ced19254b132c2e1fd5380_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} -[ \frac{\partial^{2} A_{2}}{\partial z^{2}} + 2ik_{2} \frac{\partial A_{2}}{\partial z}-k^{2}_{2}A_{2} -\frac{\omega^{2}_{2}}{c^{2}}\epsilon^{(1)}(\omega_{2})A_{2}]e^{i(k_{2}z-wt)} =\frac{8\pi \omega^{2}_{2}}{c^2}dA^{2}_{1}e^{i(2k_{1}z-\omega_{2}t)} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-83a3b5e79ed5319e3db777f34f5ff1b2_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} [ \frac{\partial^{2} A_{2}}{\partial z^{2}} + 2ik_{2} \frac{\partial A_{2}}{\partial z}]e^{i(k_{2}z-wt)} =-\frac{8\pi \omega^{2}_{2}}{c^2}dA^{2}_{1}e^{i(2k_{1}z-\omega_{2}t)} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-970db0321d719adf93489f36e27bd686_l3.png "Rendered by QuickLaTeX.com")
