
Overview:
The computational problem that I worked on for my final project was to simulate a satellite undergoing a gravity assist as it passes a planet. The “gravity assist” is a technique used to help spacecrafts reach targets that are “higher up” in the sun’s potential well. This program creates 2-D animations that are not centered around either the satellite or the planet to express the gravitational interactions between the two. What is meant by neither body being centered is that the both the planet and satellite are moving. The planet is used to change the satellite’s trajectory. The program itself generates a velocity graph of the gravity assist of a satellite as it passes by a planet and the velocity graph of a satellite that gets caught and temporarily orbits the planet. The program’s purpose is to show how the initial conditions of a spacecraft as it passes a planet determines its trajectory.
Methods:
The following image shows how the differential equations used in the program were derived. The equations are from a model for the earth’s orbit around a stationary sun. Assuming that the earth has a circular orbit around a stationary sun it allows for the use of constants instead of inputting information for the masses of the two bodies and the gravity between them. What was changed from the earth-sun example is that the larger body is in motion. Also instead of the “r” value being the radius from the sun the “r” value represents the distance between our planet and satellite.
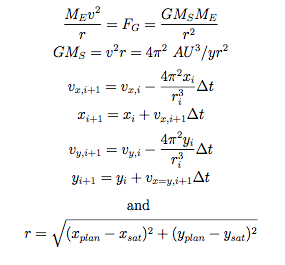
The method specifically used was the Euler-Cromer method (using i+1) because it conserves energy when used with oscillatory problems. So the positions of both the planet and satellite are calculated at each time step and then the velocities are calculated accounting for how the distance between the two change. Now the velocities are based on interactions between the two bodies. In this program it is assumed the size difference between the two is great enough that the satellite doesn’t change the planet’s path.
Figures:
Figure 1: The gravity assist of a satellite as it passes nearby a planet.
Figure 2: The gravitational capture of a satellite by a planet for two revolutions.
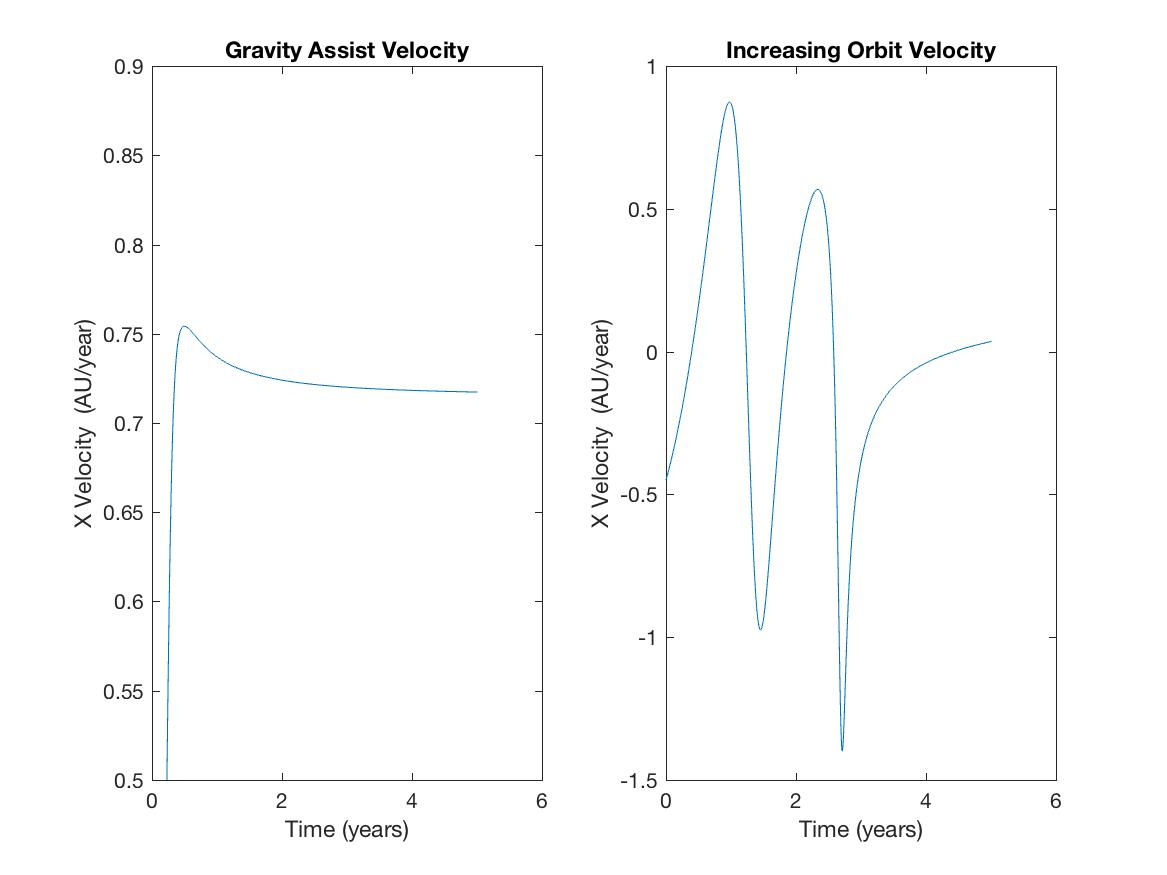
Figure 3: Graphs of the the change in the Velocity over 5 years
Discussion:
The planet’s initial conditions were an initial position at the origin and an x-velocity of 5 AU/yr. In the gravity assist simulation the satellite began 86 AU away at (-50,-75) with an initial x-velocity of 0.15 AU/yr and y-velocity of 2 AU/yr. The program then simulated the position and velocity for 5 years and after interacting with the planet the the satellite was 4,195 AU (the “r” value) from the planet and had a final x-velocity of 0.717 AU/yr and a final y-velocity of 1.61 AU/yr. So the total velocity changed from ~2 AU/yr to ~1.75 AU/yr. The left of Figure 3 shows the change in the x-velocity over 5 years, the spike in the graph represent the satellite’s interaction with the planet and then as the two get further away the velocity settles to a constant value.
The second simulation represents a “catch and release” scenario where the satellite is caught by the planet’s gravity but as the two move the satellite is able escape the planet’s gravity. In the simulation it appears that the two touch but the figures are similar to point charges in that that the mass used for the calculations is at the very center. What seems to be the outside of the shapes is just an image representation used in the simulations.
In this scenario the planet still begins at the origin but it has an x-velocity of 1 AU/yr. The satellite now begins ~74 AU away (-55,-50), has an initial x-velocity of -0.45 AU/yr and y-velocity of 0.45 AU/yr. After 5 years and two complete revolutions the satellite is ~500 AU away (the “ODr” value) and has an x-velocity of 0.036 AU/yr and a final y -velocity of 0.157 AU/yr. The total velocity decreased from ~0.64 AU/yr to ~0.16 AU/yr, the change in the x-velocity over the 5 years is shown on the right of Figure 3.
Conclusion:
The simulations accurately modeled the gravity interactions between a satellite and a planet. If the velocities of the satellite and planet are great enough as the bodies interact (~2 AU/yr for the satellite and 5 AU/yr for the planet) then the two will pass each other with only a change in trajectory of the smaller body. But if the two are moving at low velocities that are close in value (~0.64 AU/yr for the satellite and 1 AU/yr for the planet) then the smaller body will get caught in the gravity of larger.
The “gravity assist” technique allows for fuel conservations as spacecrafts travel to higher orbits because the trajectory can be changed through interactions with planets. The drawback of the technique is the total velocity decreases after interaction with the planet, in the assist case there was a decrease in velocity by 12.5%. The limitation of the program is that it is unable to simulate changing the velocity at any point in the path which could be done with a spacecraft. Further investigations could look at finding the ideal relationships between travel time, speed, and fuel consumption when trying to reach a specific trajectory.
Resources:
Giordano, Nicholas J., and Hisao Nakanishi. Computational Physics. Upper Saddle River, NJ: Pearson/Prentice Hall, 2006. Print.
“A Gravity Assist Primer.” NASA. NASA, n.d. Web. 11 Dec. 2016.
