
Update:
I concluded in my preliminary data post that the ‘Convolve’ function has its limitations and will not work properly with complicated functions. That may be so with relatively obscure functions, but I was wrong in my example. When I computed the convolution the long way by taking the Fourier transform of the product of Fourier transforms, I used the ‘FourierTransform’ function. I should have used the ‘InverseFourierTransform’ function instead. A Fourier transform of a Fourier transform is not necessarily the same as the inverse Fourier transform of a Fourier transform.
If  , then through both methods I yield this plot:
, then through both methods I yield this plot:
Mathematica file: https://vspace.vassar.edu/zerogoszinski/Update.nb
Vspace works better on Macs. If you are not using a Mac, please open the file from the Google Drive folder located at the end of this post. The file name is called ‘Update’.
Deconvolution:
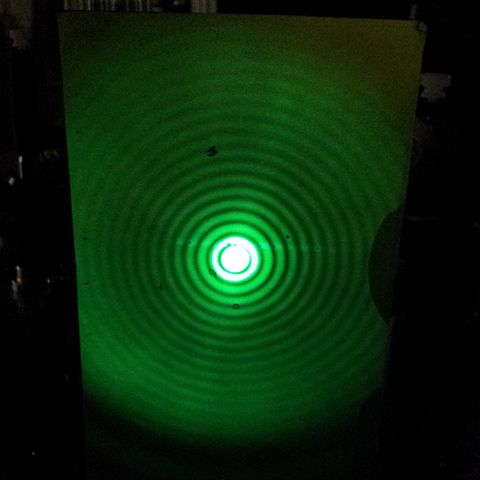
Convolution has applications in imaging, in that a blurry image is simply the convolution of the image and a lens or instrumental function. This function is also called ‘point-spread function’ (PSF). Convoluting two functions is simple since the individual functions are known. Deconvolution is the reverse process, in which you have a convolution and you want to extract the desired image. This requires an understanding of the blurring function, which requires understanding the system that is causing the distortion. Extracting the pure image is much more difficult since every blurring variable needs to be taken into account. A perfect PSF is impossible to determine, so accounting for this function requires good approximations (4). Deconvolution is very important in astronomy, since all data comes from optical based systems. Even a perfect lens convolutes images, as they have unique diffraction patterns. The best focused spot for a camera lens is called the Airy disk:

f is the focal length,  is the wavelength, and d is the diameter of the lens.
is the wavelength, and d is the diameter of the lens.
http://upload.wikimedia.org/wikipedia/commons/thumb/4/4b/Airy_disk_created_by_laser_beam_through_pinhole.jpg/480px-Airy_disk_created_by_laser_beam_through_pinhole.jpg
Here is an example of deconvolution in action:
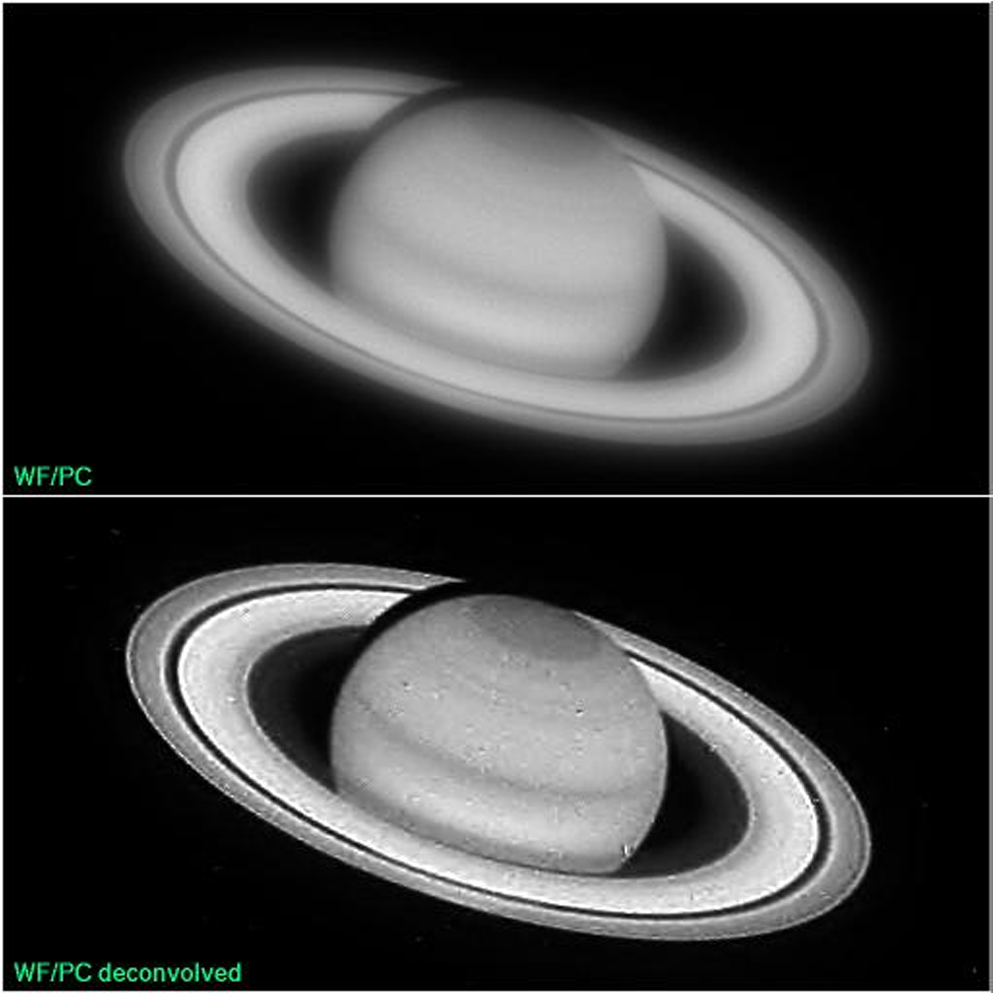
“Experience with the Hubble Space Telescope: 20 years of an archetype”
http://opticalengineering.spiedigitallibrary.org/article.aspx?articleid=1183218
A particularly cool example of the effects of PSF in astronomy is the black-drop effect during the transit of Venus. The black-drop effect is an optical effect where the planet seems to stick to the edges of the star during ingress and pull apart like taffy as it enters the surface. Calculating the transit time would determine the orbital period of Venus. Kepler’s third law would then determine the radius of orbit. Astronomers of the 18th and 19th century wanted to figure this out in order to determine the actual size of the solar system. The black drop effect made it difficult to determine the exact moment Venus entered the Sun’s surface. The cause for this effect was discovered to be mostly due to PSF (Schneider, G., Pasachoff, J. M., Golub, L., 2004, Icarus, 168, 249). Poor optics creates this optical illusion, and accounting for point-spread function [and solar limb darkening] eliminates this effect.

Click to see the animation.
Created by Zeeve Rogoszinski using data taken from Big Bear Solar Observatory.
http://imgur.com/p19moKI
As you can see convolution and deconvolution have important applications in optics. Light beams get distorted as they pass through matter, and the scientist needs to be able to determine what exactly he or she is looking at. If I had the time I would have tried to deconvolute my convolution in the previous post, and try to extract one of the optical filters. I would have first assumed I knew what the second filter looked like, and try to work out the procedure from there. I would then assume I have no idea how the filters behave, and try to blindly deconvolute the filters. This would require looking into the theory behind deconvolution in a more rigorous manner.
Transit Paper:
http://web.williams.edu/Astronomy/eclipse/transits/Schneider_jmp_lg_Icarus2004.pdf
All of my data:
https://drive.google.com/folderview?id=0BxRRP3LUVuftVmFCcnNPMWFhU1k&usp=sharing

Wow. Overall, I loved reading your project and seeing what you had to say- you seem to have a fairly thorough understanding of the material, and you explained it well enough that I could understand it having little to no background in this particular topic. You set the bar very high for yourself at the beginning, and even though you didn’t quite finish what you initially set out to do, you came up with solutions to all of the problems you came across and managed to make Mathematica accomplish some impressive things.
Things I particularly liked:
-I appreciated that you showed the limitations of the functions and approaches you were using.
-I liked that you acknowledged the errors you made earlier in the process and explained your solutions once you found them (I’m thinking particularly of the note you made about the inverse Fourier transform being different from taking the Fourier transform twice, or something along those lines)
-The examples at the end really put the work into context for me, so I really liked those as well.
Things I would have liked to see:
-I am slightly confused why putting your data into Excel suddenly made it real. I’m sure there’s an explanation, but it would have been nice to have a sentence or two about why that happened.
-It would have been nice to have a little bit more explanation about what cyclic versus normal convolution means. You mention that it’s a problem, but don’t really explain the term.
(I know both of these are fairly nit-picky, but your explanations are really thorough, so these were the only points I was confused about)
Questions that arose:
-I’m curious why of the two methods you had, the one that involved multiple Fourier transforms is somehow simpler than the other approach. It seems to me that a single function call would be simpler than multiple Fourier transforms- is there just something strange about Mathematica’s “convolve” function that makes it only work for simple cases?
-Do you have any ideas why the method you used initially works for continuous but not discrete functions?
Again, this was a really fun project to read. Well done!