There are three main methods that allow Maglev technologies to operate.
The first, electromagnetic suspension (EMS), involves electromagnets on the levitating object that are oriented toward the rail from below. However, since magnetic attraction varies inversely with the cube of distance, minor changes in the distance from the rail cause the lifting force to vary greatly. This is why the EMS method is typically considered unstable; it requires a feedback control to vary the current passing through the electromagnet, to continuously adjust the magnetic field so that the object maintains a constant height above the track. Then, to propel the object forward, some additional method must be employed, whether it involves the use of a propeller, an engine, or propulsion coils, the latter of which is explained in the section below.
The second method, called electrodynamic suspension (EDS), requires that both the levitating object and the track exert a magnetic field, so that the object is levitated by the repulsive force between the two fields. For this case, the magnetic field produced by the object can originate from either superconducting magnets or permanent magnets; the field produced by the track is an induced magnetic field created by current-carrying wires inside the track. One benefit of this method is that no feedback control system is necessary for the object to remain at a constant height above the track. Then, to make the object move forward along the track, propulsion coils carrying AC current generate a continuously-changing magnetic field that exerts a force on the magnets in the object. The frequency of the AC current is coordinated such that the field always repels the magnets in the object, sending it forward.
The third method, magnetodynamic suspension (MDS), employs the attractive magnetic force of a permanent magnet near a metal track to hold it in place. Then, propulsion is attained by the same methods as in the EMS system. However, since this method has not been fully developed and employed widely, I will focus my attention on the two previous methods of magnetic levitation.
In order to achieve stability while the object (a maglev train) is moving forward along the track, the EMS method uses the feedback control to adjust the magnetic field strength produced by the train’s electromagnets by altering the current running through them. Meanwhile, in an EDS system, no feedback control is necessary because, as the distance between the train and the track decreases, the magnetic force exerted on the train by the track increases, and vice-versa, until the train remains at a stable height above the track.
Additional effects that allow maglev trains to remain at a steady height above the track include the Meissner effect, and magnetic flux trapping. If the train contains a superconductor while the track consists of permanent magnets, the magnetic field created by the track can be expelled from the object’s electromagnet by cooling the superconductor below its superconducting transition temperature (also called the critical temperature). This expulsion of magnetic fields from a superconductor while it’s below its critical temperature is the Meissner effect. However, while most of the magnetic field is expelled from the superconductor, some of it still passes through, thus causing the superconductor to be both attracted to and repelled away from the track. The superconductor – and consequentially, the train itself – is essentially “trapped in space” above the track, yet free to move along the track with zero ground friction. This phenomenon is called magnetic flux trapping. The Meissner effect and magnetic flux trapping are further explained and demonstrated in the following videos:
How Superconducting Levitation Works
Maglev Trains
~~~~~~~~~~~~~~~~~~~~~~~~~
For my project, I will model the magnetic field produced by the superconducting magnet on the train, as well as the field produced by the tracks, and potentially, a combination of how the two fields interact. With this I will model the force of repulsion between the train and the tracks, which should display how the force varies as the distance between the train and the track changes. Then, I hope to create a resultant graph showing how the train’s distance from the track changes (or, as I hope to expect, does not change).
One equation that I am considering using to model the behavior of a magnetically levitating object is that for the magnetic field (or magnetic flux density) above the supporting magnet, given by:
(1) ![\begin{equation*} B_{z}=\frac{M}{4\pi}\iint{\left( \frac{z}{(x^2+y^2+z^2)^{3/2}}-\frac{z+2a}{[x^2+y^2+(z+2a)^2]^{3/2}} \right)dxdy \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-64edd21e51d7fddda46fbdfaa37c2b4c_l3.png "Rendered by QuickLaTeX.com")
(Jayawant, Electromagnetic Suspension and Levitation)
where M is the intrinsic magnetization, z is the height above the magnet, x is the position in the x-direction, y is the position in the y-direction, and 2a is the depth of the supported magnet.
Additionally, I will consider the equation for the force of repulsion on the object by the supporting magnet, given by the equation:
(2) ![\begin{equation*} F(h)=\frac{MPR}{\mu_0(p-1)(q-1)}\sum_{j'=1}^{p-1}\sum_{k'=1}^{q-1}\left[ B_{z}(j',k',h)-B_{z}(j',k',h+2d)\right] \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-e497c0986eff5626ddc6e59fa46b4468_l3.png "Rendered by QuickLaTeX.com")
(Jayawant, Electromagnetic Suspension and Levitation)
where h is the gap length, 2d is the magnet depth (given as 2a in Equation 1), M is the intrinsic magnetization, R is the length of the magnet along the x-axis (the direction of motion), P is the length of the magnet along the y-axis, µ0 is the magnetic permeability of free space, j and k refer to the rows and columns of a superimposed repulsion force matrix (which acts as a “grid” for any specified piece of the magnet), and p and q are infinitesimally small lengths that make up the dimensions of some piece of the magnet in the xy-plane (and are intended to be as large as possible).
I may need to manipulate these equations a bit before employing them in my studies, but I will make sure that whatever changes I make will still model the system as accurately as my assumptions will allow.
The goal of my project is to develop graphs for the magnetic fields produced by the object and the track, and, as I mentioned before, I would like to model the interaction of these fields as well. Graphs of the repulsion force and resulting position of the object with respect to the track will be necessary to analyze the relationship between the two variables. I am expecting my plots to show a strong relationship between force and distance from the track, such that the distance steadies out to a constant height over a length of time. As for the plot of the magnetic fields, I expect that they will interact such that the repulsive force acting on the object will allow the object to remain above the track at a reasonable distance. I may also look into magnetic pressure, and how this variable might explain how and why the object levitates.
References:
Jayawant, B. V. “Electromagnetic Suspension and Levitation.” Reports on Progress in Physics. 44.4 (1981): 413-474. 3 Apr. 2012. <http://www.maglev.ir/eng/documents/papers/journals/IMT_JP_56.pdf>.


![\[\Phi = \int \vec{B} \cdot d\vec{a} = BA_{loop} = Blw = Bl\frac{2 \pi b}{n}.\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-bc094b1f537fe39d30ee7434111cb961_l3.png "Rendered by QuickLaTeX.com")
![\[B = \frac{1}{r^3} B_0 = \frac{B_0}{(b-a)^3}\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-8f4dab56862521b9a87225ca9e005756_l3.png "Rendered by QuickLaTeX.com")
![\[B = \frac{B_0}{(b-a)^3} [\frac{8}{\pi ^2} \Sigma_{k = 1, 3, 5}^{\infty} \frac{(-1)^{(k-1)/2}}{k^2} \sin(fkt)]\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-3258a7236a80c110b01590609c63310a_l3.png "Rendered by QuickLaTeX.com")
![\[T = \frac{\text{angle passed through}}{\text{velocity with which magnets pass through angle}} = \frac{2 \cdot (2 \pi / n)}{\omega_s - \omega_r} = \frac{4 \pi}{n(\omega_s - \omega_r)}\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-936d2c9ea91cb7de2cc7b27df6ef9e62_l3.png "Rendered by QuickLaTeX.com")
![\[f = \frac{1}{T} = \frac{n(\omega_s - \omega_r)}{4 \pi}\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-968eb4ba883c053e20bcd9703420935b_l3.png "Rendered by QuickLaTeX.com")
![\[\Phi = \frac{16B_0b}{(b-a)^3n \pi} [\sin(ft) -\frac{1}{9}\sin(3ft) + \frac{1}{25}\sin(5ft)]\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-eb8ef336ffedffbb77fb52de2a4c1808_l3.png "Rendered by QuickLaTeX.com")
![\[\varepsilon = -\frac{4B_0bn(\omega_s - \omega_r)}{(b-a)^3\pi ^2} [\cos(ft) - \frac{1}{3}\cos(3ft) + - \frac{1}{5}\cos(5ft)]\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-9ceee6a0eaa9a7cb2ffea3bd1bfd0f03_l3.png "Rendered by QuickLaTeX.com")
![\[f = \frac{n(\omega_s - \omega_r)}{4 \pi}\]](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-ba96dc47746d3833306f0396a7417b43_l3.png "Rendered by QuickLaTeX.com")





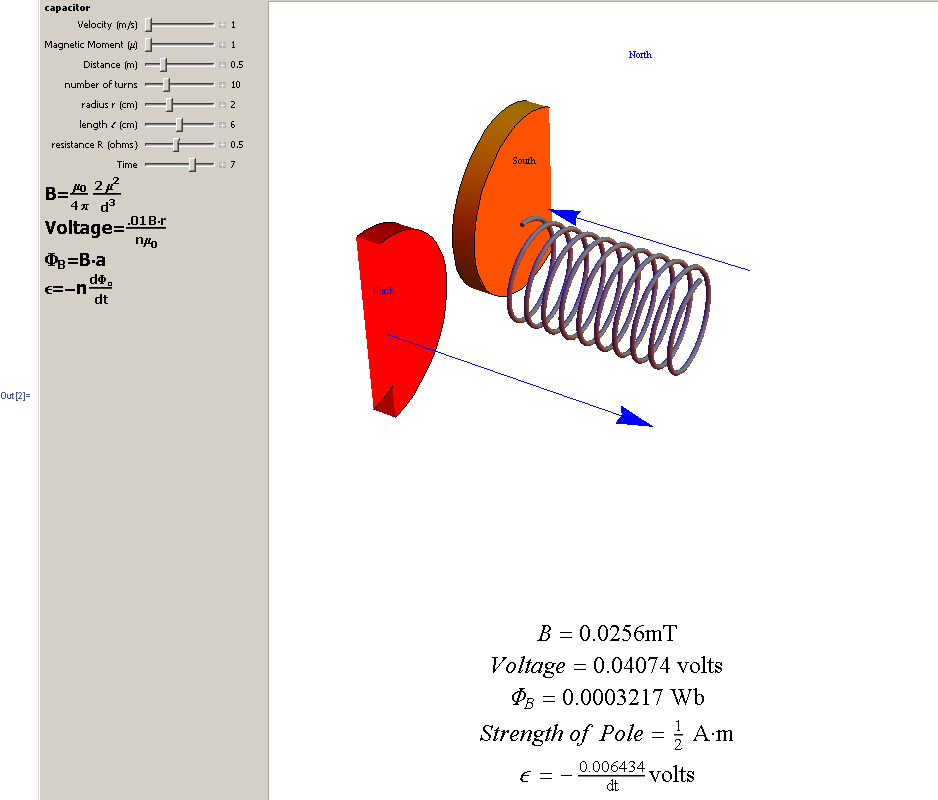



 is the Magnetic Moment,
is the Magnetic Moment,  is the electromotive force, and
is the electromotive force, and