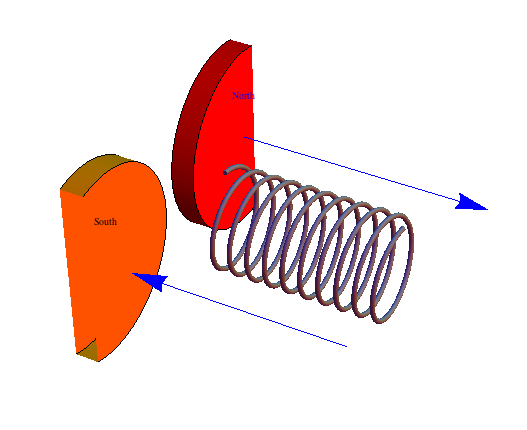
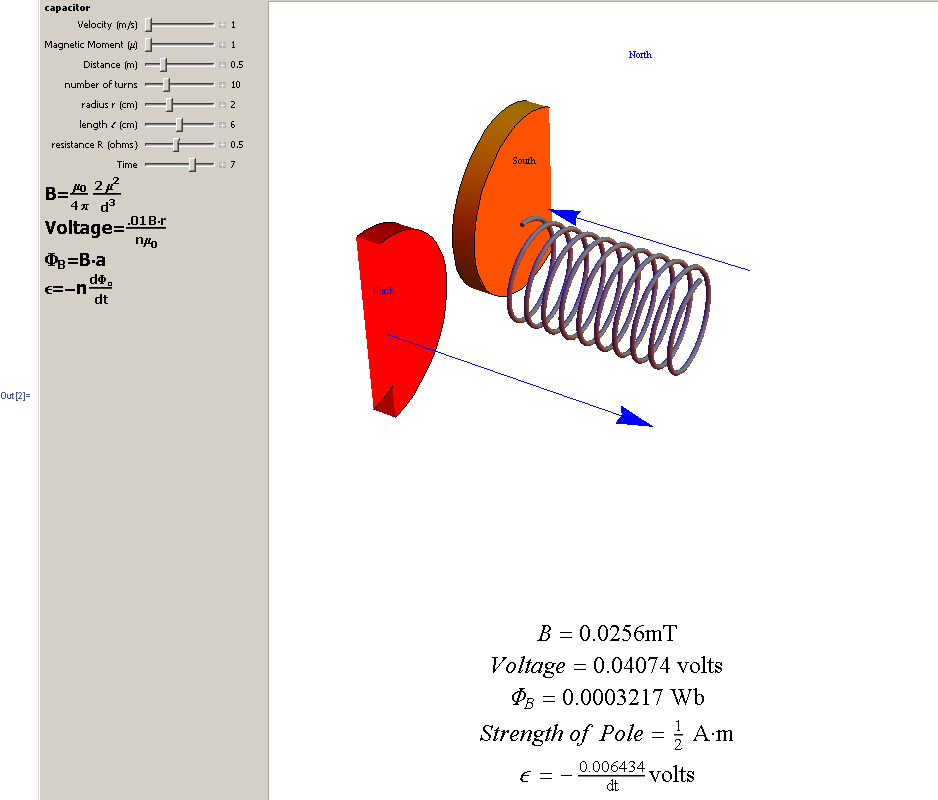
Mistakes were made throughout this process. Some were as simple as a dropped variable and others were intensely more complicated. In the end I was still able to produce what I set out to do: An interactive animation that allows you to see how a single coil in a stator of magnetic induction based wind turbine creates current.
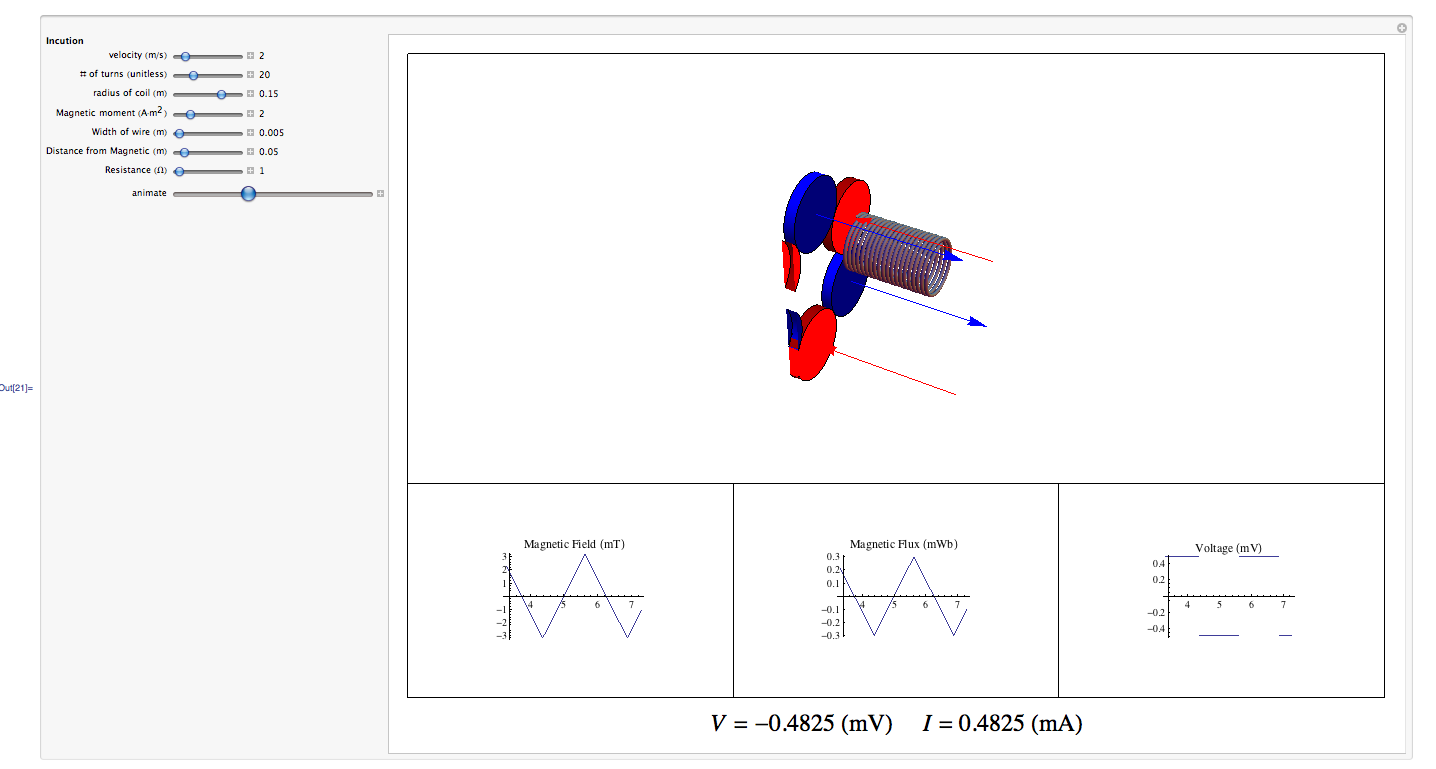
Much of the work I did was simply writing the code to get the interactive animation to function properly. Below is a screenshot, but the important code is linked to at the end of this post.
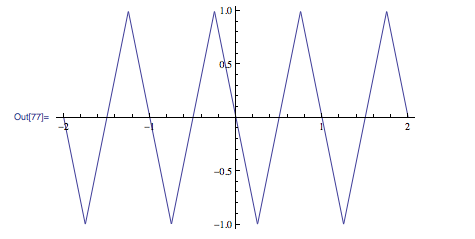
Just to recap some of the derivation I did in earlier posts, I will present a short breakdown here. I started with the basic equation for B, but in order to have the magnetic field change over time based on my magnet array, I had to use a triangle wave. In my previous post I inserted values for the period, but in my Mathematica code, I made it dependent on the velocity so that all the graphs would match up.
Triangle Wave Function:
(1) ![\begin{equation*} \frac{4}{d/v}\left [ (t-2d/v)\cdot \left \lfloor \frac{2td}{v}+.5 \right \rfloor \right ]\cdot (-1)^{\left \lfloor \frac{2td}{v}+.5 \right \rfloor} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-3f591c8956631fb5d60f2cacaa4bdcc8_l3.png "Rendered by QuickLaTeX.com")
Magnetic Field Equation
(2) ![\begin{equation*} B=\frac{2\mu }{d^{3}}10^{-4}\frac{4}{d/v}\left [ (t-2d/v)\cdot \left \lfloor \frac{2td}{v}+.5 \right \rfloor \right ]\cdot (-1)^{\left \lfloor \frac{2td}{v}+.5 \right \rfloor} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-8a60c7a149de957131a98715e2cf96d9_l3.png "Rendered by QuickLaTeX.com")
Once I had my B(t) I quickly found the flux, but to get to the voltage I had to find the derivative of my triangle wave based B(t) function. I made a square wave approximation to solve for the derivative. In my last post I again plugged in constants in order to show the look of the graph, but in my code I made it dependent on all of the variables.
(3) 
Using this square wave approximation I was able to find the voltage in the coil. Once I had a formula for the voltage, the induced current was simple to find.
At this point I noticed a grave mistake with my approach to this problem. By approximating the magnetic field with a triangle wave, I made it so the voltage simply flipped back and forth from negative to positive with no gradation. In hindsight it would have been better to use a version of a sin wave as an approximation. That would present its own issues, as the magnetic field would have a fairly linear change. With more time I would have attempted to find a better approximation for the magnetic field that was easier to use.
It should also be noted that my last post had a few typos in it that could be very confusing. I wrote the equation:
(4) 
but it should read:
(5) 
The mu was confused for most of the post, but I was able to correct the issues I had with it for all of the formulas in this post and the code.
Code: https://vspace.vassar.edu/thvandermeer/Trying%20to%20get%20graphs%20in%20it.nb

 and scaling it to get millitesla I get the equation:
and scaling it to get millitesla I get the equation:

 are floor functions.
are floor functions. we can say that
we can say that  .
.



 is the diameter of the wire and N is the number of turns.
is the diameter of the wire and N is the number of turns. with respect to t. Luckily, we did most of the work already when we derived B(t). The new equation reads:
with respect to t. Luckily, we did most of the work already when we derived B(t). The new equation reads:



 and the negative slope is
and the negative slope is  . From here I can ascertain the derivative simply by finding a function that flips back and forth between those two values every
. From here I can ascertain the derivative simply by finding a function that flips back and forth between those two values every  , which should look like a square function.
, which should look like a square function.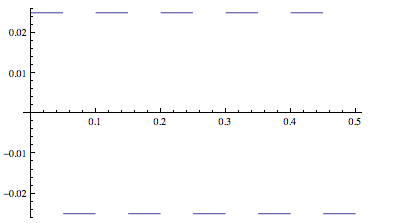
![\begin{equation*} .025\cdot sgn [sin(\frac{\pi t}{.05v)}] \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-a34736d1a434fddb943f1e8366405af3_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} \varepsilon = C \cdot .025\cdot sgn [sin(\frac{\pi t}{.05v})] \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-7101b86e94b893582fe0adf1d58e1fd4_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} I(t)=\frac{\varepsilon}{R}=.025C \frac {sgn [sin(\frac{\pi t}{.05v})]}{R} \end{equation*}](https://pages.vassar.edu/magnes/wp-content/ql-cache/quicklatex.com-e7afaae06b1be564d63c2ae40327f8be_l3.png "Rendered by QuickLaTeX.com")




 is the Magnetic Moment,
is the Magnetic Moment,  is the electromotive force, and
is the electromotive force, and