
Bats are the only mammals capable of flight and utilize echolocation to interact with their environments. Animal flight is an intricate motor function that requires fine motor control and fast sensory interpretation. Echolocation, also known as biological sonar, is a prevalent sensory system in bat species. Echolocation consists of emitting a call out to hear the returning echoes in order to locate and identify your environment and what it contains, whether it be prey or anything else.
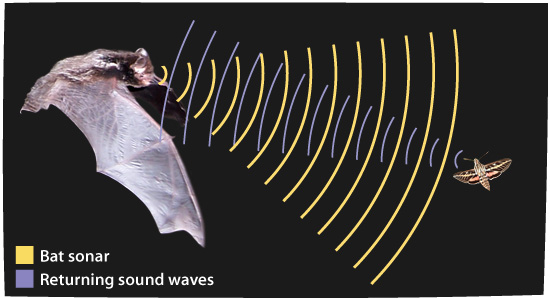
An example of echolocation, in which the emitted call is returning to the bat after reflecting of its prey (http://askabiologist.asu.edu/)
Bar et al. (2015) attempted to analyze the flight pattern/trajectory of bats and their use of echolocation to determine this established trajectory, and they attempted do so through developing a sensory-motor model that would accurately replicate the different motor patterns/flight trajectories (light vs dark conditions) based on the sensory information available. They hoped this would further advance our knowledge of the importance of discriminating important sensory cues from the vast sensory information available in the environment, in order to accurately and efficiently respond to that situation and environment.
The researchers were hoping to answer whether bats utilized another aspect of sensory information from their echolocation in order to accurately interpret sensory signals and assess the appropriate instantaneous movements required during flight. Furthermore, they also hoped to analyze whether bats adjusted their approach to emitting/detecting sensory signals(vision/echolocation) in the presence of sensory noise (distractions/obstructions) from the environment, in this case light (low noise-level) versus dark (high noise-level) conditions. They attempted to construct a sensory-motor control model to exemplify and mirror a bat’s sensory system, both visual and echolocation, and flight path by receiving sensory input from the environment and attempting to calculate the flight trajectory needed to land on a target. Their model was based on a proportional-derivative(PD) controller, in which a derivative is added onto a proportional controller, a feedback system based on adjusting according to an error’s value, in order to prevent it from overshooting its estimate. They tested their model by inputting behavioral data (initial flight angle, initial velocity, the initial position of the bat and the target, fixed parameters ) from previously conducted behavioral tests, and attempting to establish a model with a high-similarity/low error-rate when comparing flight trajectories between the previously recorded studies and the ones produced by their model.
Prior to the behavioral testing, the Egyptian fruit bats (Rousettus aegyptiacus) were trained to land on a small (10 cm diameter) sphere which was randomly placed in a large room (6×7 m) during each testing period. The bats were first tested in the dark condition where they solely relied on their advanced echolocation and reflected echo cues to navigate and land on the sphere. The dark period testing depicted that bats flew in a curved trajectory when attempting to land on a target in dark conditions, and sometimes even circled the target a few times before landing. However when tested in the light condition, the bats were seen to reduce the curvature in their flight trajectory.

Egyptian Fruit Bat (Rousettus aegyptiacus) (wikimedia.org)
The researchers then took the results of the behavioral testing and applied it to the PD sensorimotor control model they developed in order to examine the process of determining and changing flight trajectory. Their model proved to effectively explain rapid maneuvering as both the proportional term and the derivative term function as feedback systems to one another in order to correct for both flight trajectory error and destabilization. They also attempted to assess what may have caused this decrease in flight curvature in the light condition compared to the dark condition. The results of this study conveyed that the PD sensorimotor model was able to accurately depict flight trajectory in dark conditions and suggested that in order to land in the dark, bats must integrate (or average) the sensory data available (only echolocation) in milliseconds.
However, their PD sensorimotor model was unable to accurately depict and explain the decreased curvature in the bats’ flight trajectories present in the light conditions. Therefore they attempted to integrate aspects of vision (PD+vision), such as an increase in the rate of sensory information updates (from the 10 Hz present in sonar to the 25 Hz present in vision), to their model in an attempt to more accurately demonstrate a similar flight trajectory, with less curvature, in their model predictions. They found that in the presence of light, fruit bats utilized their excellent vision in combination with their echolocation to cut down on the amount of sensory noise present and more effectively calculate a flight trajectory with less curvature. They suggest that the integration of vision may have improved the flight trajectory by the increased acuteness and more rapid refresh rate characteristics of vision and these influences on sensory noise discrimination and improved sensory cue interpretation. Furthermore, they then applied this PD+vision model to the dark condition and found that the model flight trajectories depicted much less curvature than the actual behavioral data demonstrated. Therefore, the researchers concluded that it is not the motor limitations but the sensory limitations, caused by the increase in sensory noise and slower sensory-update rate, that prevents the bats from having a straighter flight trajectory in the dark.
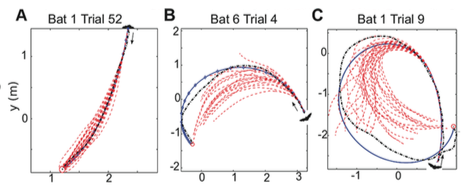
These graphs depict the flight trajectories of the behaviorally tested bats (black dotted line) in comparison to the PD simulated trajectory (noise-filtered) (blue dotted line) and the PD simulated trajectories (noise-present) (red dotted line).
(Bar et al. 2015)
This research is an important step in better understanding how certain species are capable of integrating several sensory systems and cues to better understand their environment in order to appropriately react and respond to it, and all in a matter of milliseconds. Future work may further this research by attempting to utilize their sensorimotor model of echolocation in other species and environmental conditions in order to further understand the alterations in sensory emission/interpretation that must be hastily made in varying conditions.
References:
Bar, N.S., Skogestad, S., Marçal, J.M., Ulanovsky, N., Yove, Y. (2015). A sensory-motor control model of animal flight explains why bats fly differently in light versus dark. PLOS Biology. 10.1371, 1-18
Image #1: (http://askabiologist.asu.edu/sites/default/files/echolocation.jpg)
Image#2: (http://upload.wikimedia.org/wikipedia/commons/thumb/4/44/Egyptian.fruitbat.arp.jpg/614px-Egyptian.fruitbat.arp.jpg)